Uncertainty-aware Self-supervised 3D Data Association
3D object trackers usually require training on large amounts of annotated data that is expensive and time-consuming to collect. Instead, we propose leveraging vast unlabeled datasets by self-supervised metric learning of 3D object trackers, with a focus on data association. Large scale annotations for unlabeled data are cheaply obtained by automatic object detection and association across frames. We show how these self-supervised annotations can be used in a principled manner to learn point-cloud embeddings that are effective for 3D tracking. We estimate and incorporate uncertainty in self-supervised tracking to learn more robust embeddings, without needing any labeled data. We design embeddings to differentiate objects across frames, and learn them using uncertainty-aware self-supervised training. Finally, we demonstrate their ability to perform accurate data association across frames, towards effective and accurate 3D tracking.
Overview of the Algorithm
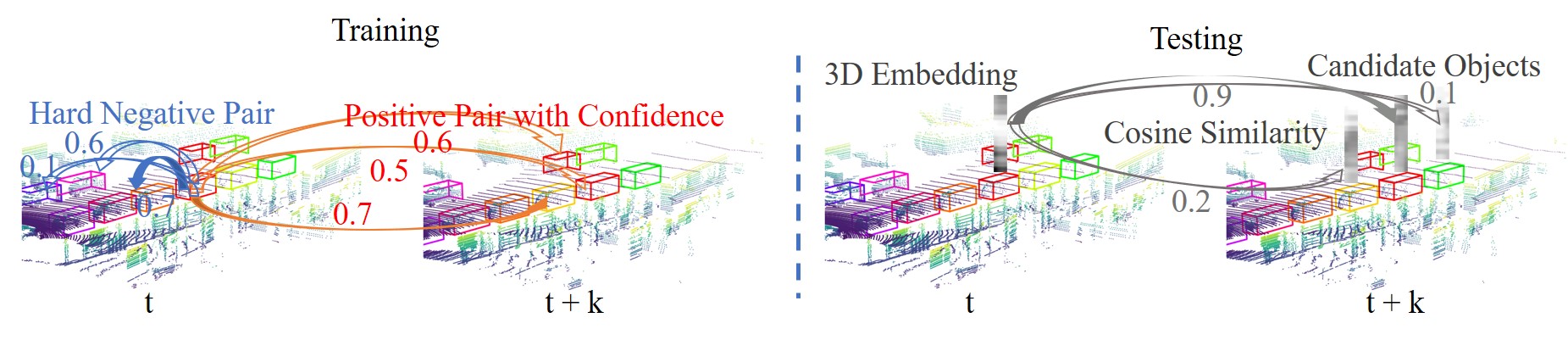
Left: Triplet example during self-supervised training. For any anchor detection in frame t, we select the hardest negative example from the same frame whose embedding produces the largest cosine similarity with the anchor detection. A positive example is picked from a detection in another frame that is associated with the same track as the anchor detection. A confidence of association is estimated and used to weight this example during self-supervised training. We train the embedding network to maximize the agreement between associated pairs. Right: At test time, self-supervised embeddings are extracted from each candidate detection in a frame. We use cosine similarity of embeddings extracted from each pair of objects to represent their appearance similarity, which is further used to perform accurate data association across frames.
|
Paper and Bibtex

|
|
Citation
Jianren Wang, Siddharth Ancha, Yi-Ting Chen, David Held.
Uncertainty-aware Self-supervised 3D Data Association
In IROS 2020.
[Bibtex]
[Paper]
[ArXiv]
|
|
|
|
@inproceedings{jianren20s3da,
Author = {Wang, Jianren and Ancha, Siddharth and Chen, Yi-Ting and Held, David},
Title = {Uncertainty-aware Self-supervised 3D Data Association},
Booktitle = {IROS},
Year = {2020}
}
|
Acknowledgements
This material is based upon work supported by the National Science Foundation under Grant No. IIS-1849154, by the United States Air Force and DARPA under Contract No. FA8750-18-C-0092, and by the Honda Research Institute USA.
|